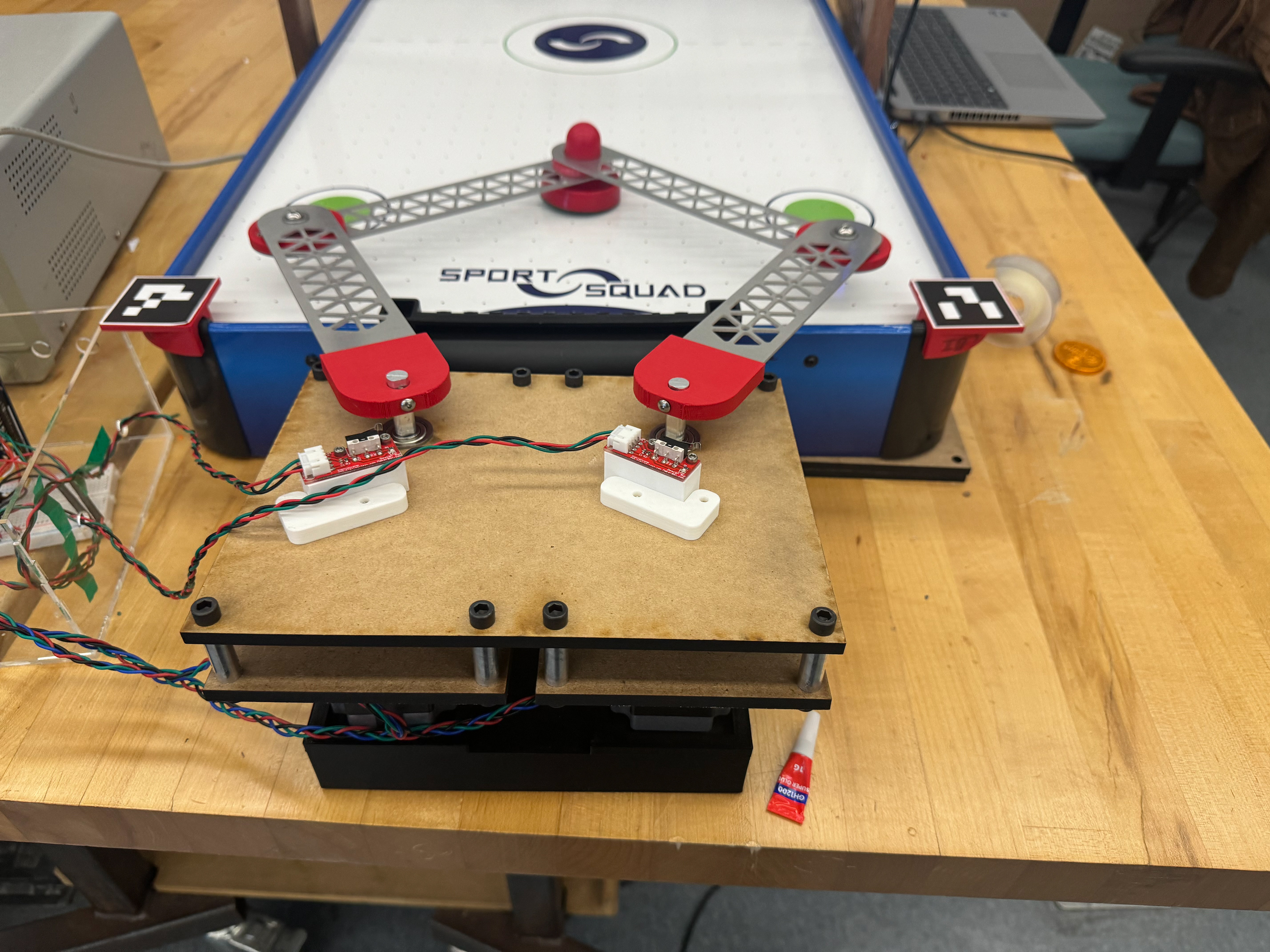
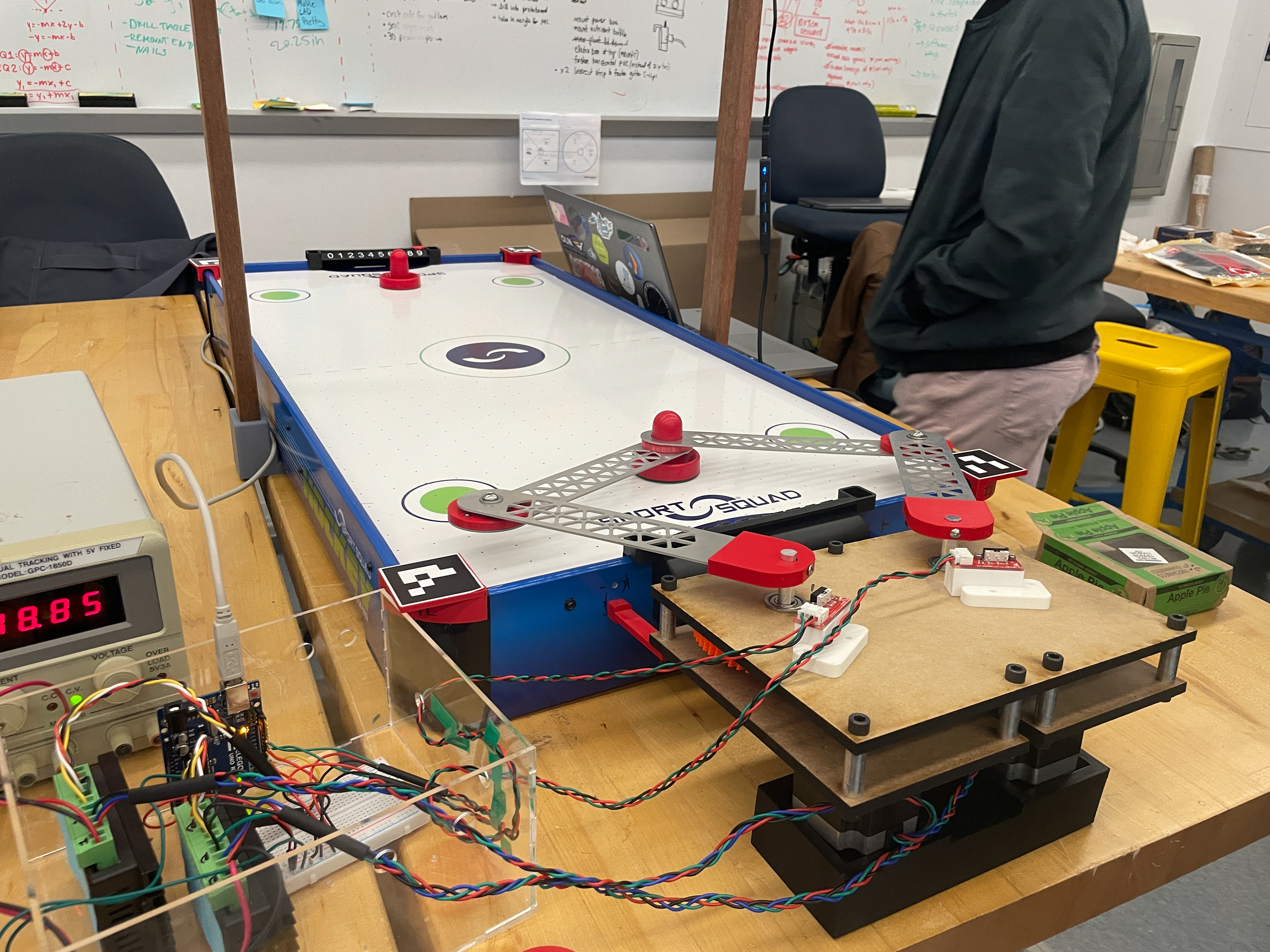
This robot was designed as the final project for Principles of Integrated Engineering at Olin College of Engineering. This project was required to have a non-trivial mechanical, electrical, and software system. Our team of five decided to make a robot to play defense against a player in air hockey.
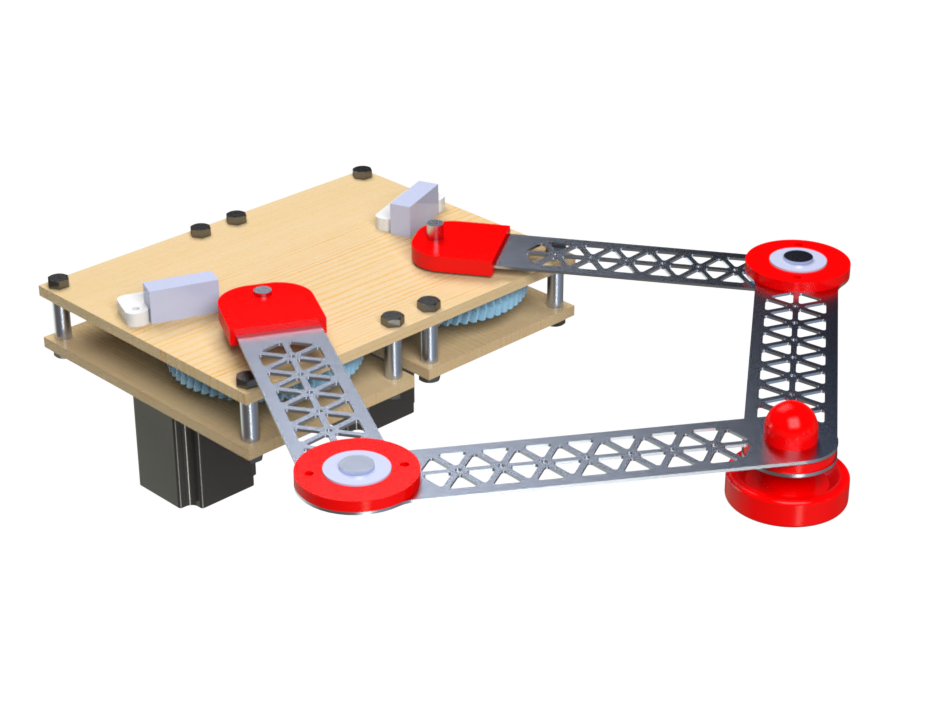
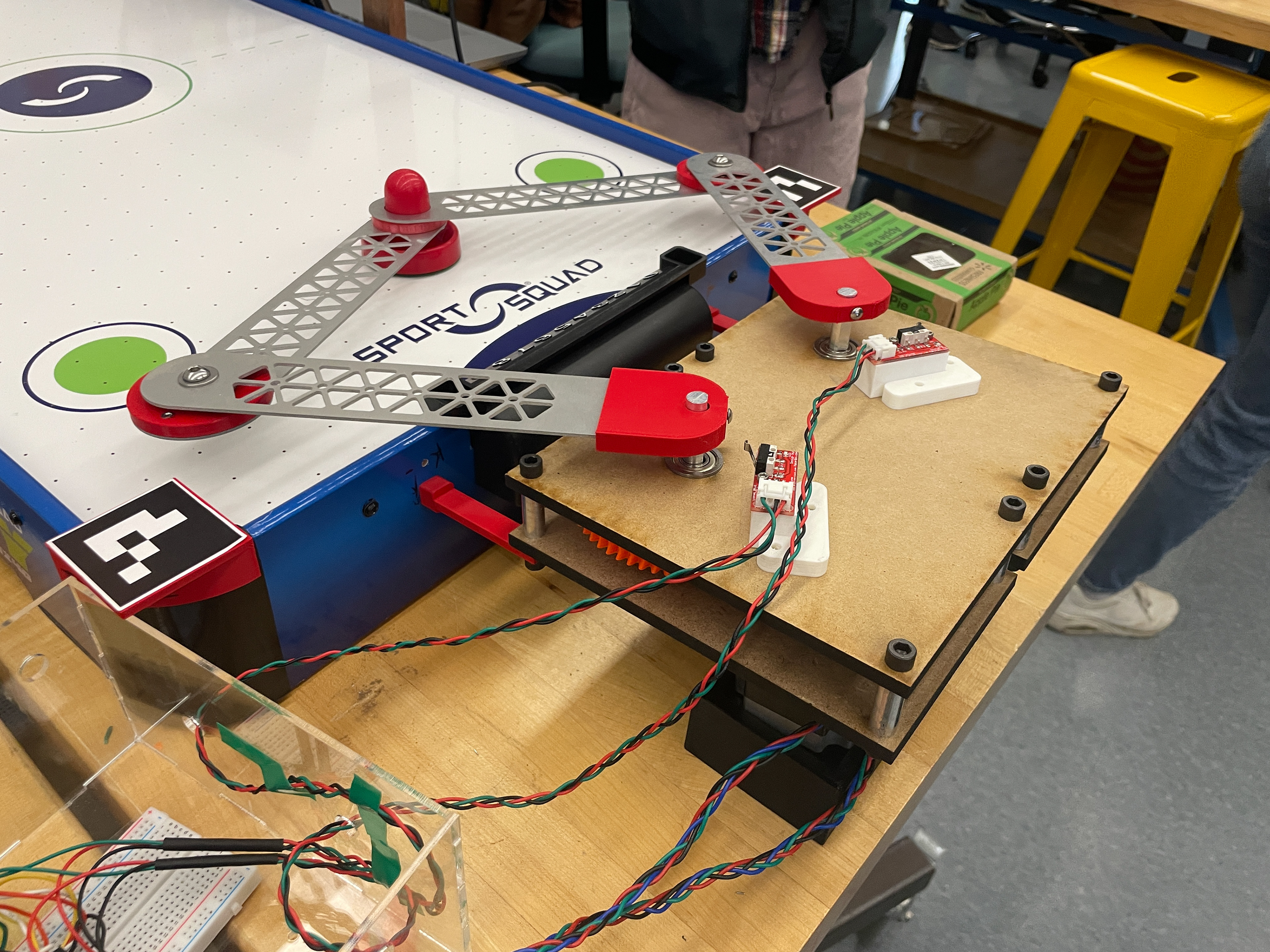
I led the mechanical design of this project. We used a parallel SCARA arm to achieve movement in two directions using two NEMA 23 stepper motors. To reach the torque we needed for the arm, we used a 3:1 gearbox reduction. I used SOLIDWORKS to design this mechanism and 3D printing, laser cutting, waterjetting, and lathing to fabricate this robot.